《2019高考物理一輪復(fù)習(xí) 第十章 電磁感應(yīng) 第75講 電磁感應(yīng)中的圖象問(wèn)題加練半小時(shí) 教科版》由會(huì)員分享���,可在線(xiàn)閱讀�,更多相關(guān)《2019高考物理一輪復(fù)習(xí) 第十章 電磁感應(yīng) 第75講 電磁感應(yīng)中的圖象問(wèn)題加練半小時(shí) 教科版(9頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索��。
1��、
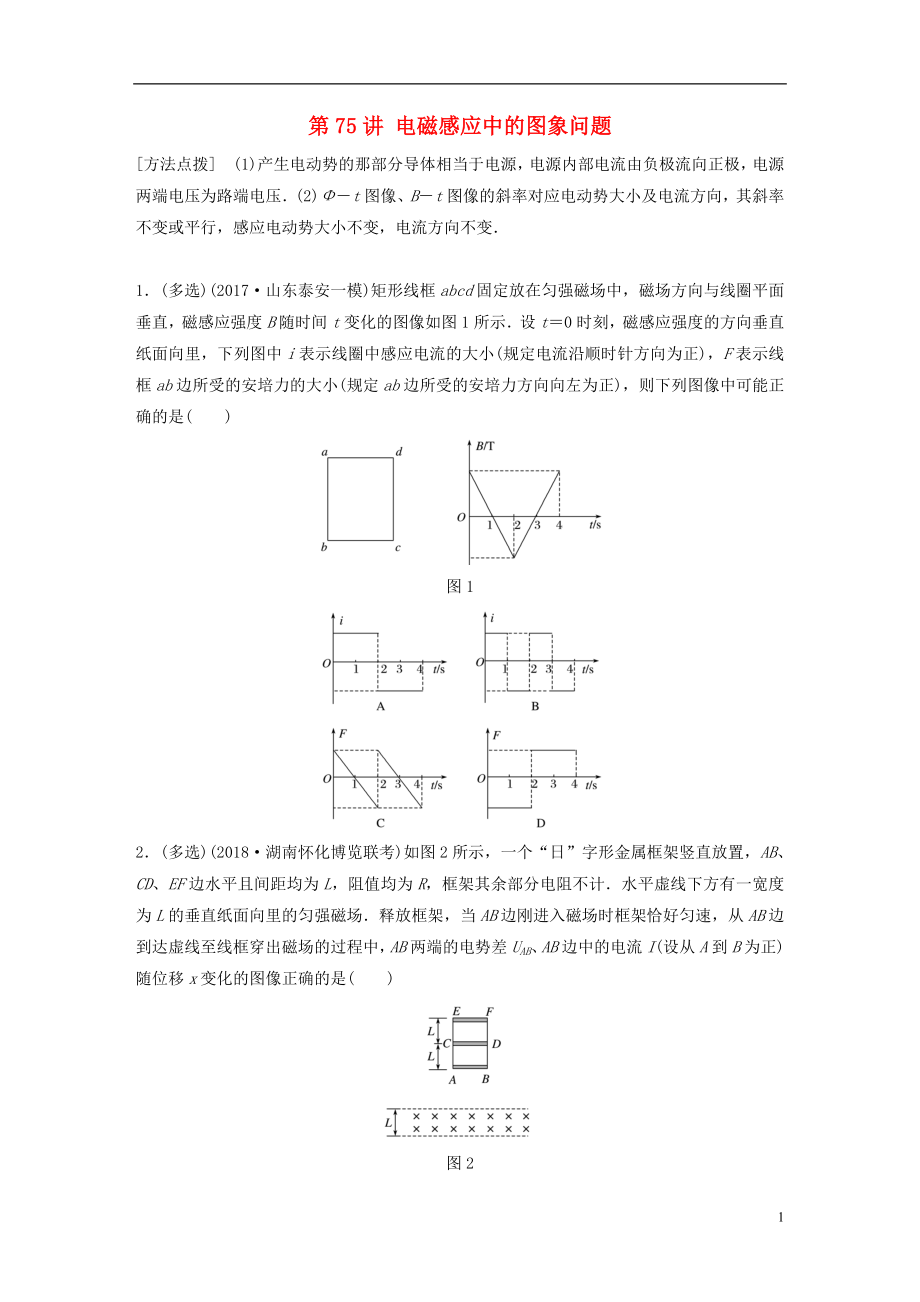
第75講 電磁感應(yīng)中的圖象問(wèn)題
[方法點(diǎn)撥] (1)產(chǎn)生電動(dòng)勢(shì)的那部分導(dǎo)體相當(dāng)于電源�,電源內(nèi)部電流由負(fù)極流向正極,電源兩端電壓為路端電壓.(2)Φ-t圖像�、B-t圖像的斜率對(duì)應(yīng)電動(dòng)勢(shì)大小及電流方向,其斜率不變或平行���,感應(yīng)電動(dòng)勢(shì)大小不變�,電流方向不變.
1.(多選)(2017·山東泰安一模)矩形線(xiàn)框abcd固定放在勻強(qiáng)磁場(chǎng)中�,磁場(chǎng)方向與線(xiàn)圈平面垂直,磁感應(yīng)強(qiáng)度B隨時(shí)間t變化的圖像如圖1所示.設(shè)t=0時(shí)刻�,磁感應(yīng)強(qiáng)度的方向垂直紙面向里,下列圖中i表示線(xiàn)圈中感應(yīng)電流的大小(規(guī)定電流沿順時(shí)針?lè)较驗(yàn)檎?�,F(xiàn)表示線(xiàn)框ab邊所受的安培力的大小(規(guī)定ab邊所受的安培力方向向左為正),則下列圖像中可
2�����、能正確的是( )
圖1
2.(多選)(2018·湖南懷化博覽聯(lián)考)如圖2所示,一個(gè)“日”字形金屬框架豎直放置���,AB�、CD�����、EF邊水平且間距均為L(zhǎng)��,阻值均為R�,框架其余部分電阻不計(jì).水平虛線(xiàn)下方有一寬度為L(zhǎng)的垂直紙面向里的勻強(qiáng)磁場(chǎng).釋放框架����,當(dāng)AB邊剛進(jìn)入磁場(chǎng)時(shí)框架恰好勻速,從AB邊到達(dá)虛線(xiàn)至線(xiàn)框穿出磁場(chǎng)的過(guò)程中��,AB兩端的電勢(shì)差UAB�����、AB邊中的電流I(設(shè)從A到B為正)隨位移x變化的圖像正確的是( )
圖2
3.(2017·山西太原模擬一)如圖3甲中��,兩平行光滑金屬導(dǎo)軌放置在水平面上��,間距為L(zhǎng),左端接電阻R��,導(dǎo)軌電阻不計(jì).整個(gè)裝置處于方向豎直向下����、磁感應(yīng)強(qiáng)度
3、為B的勻強(qiáng)磁場(chǎng)中.將質(zhì)量為m�����、電阻為r的金屬棒ab置于導(dǎo)軌上.當(dāng)ab受到垂直于金屬棒的水平外力F的作用由靜止開(kāi)始運(yùn)動(dòng)時(shí)���,F(xiàn)與金屬棒速度v的關(guān)系如圖乙.已知ab與導(dǎo)軌始終垂直且兩端接觸良好���,設(shè)ab中的感應(yīng)電流為I,ab受到的安培力大小為FA�,R兩端的電壓為UR,R的電功率為P�,則下列圖中大致正確的是( )
圖3
4.(多選)( 2017·湖南長(zhǎng)郡中學(xué)一模)在絕緣水平桌面上有MN、PQ兩根平行的光滑金屬導(dǎo)軌���,導(dǎo)軌間的距離為l���,金屬棒ab和cd垂直放在導(dǎo)軌上�����,兩棒正中間用一根長(zhǎng)l的絕緣細(xì)線(xiàn)相連.棒ab右側(cè)有一直角三角形勻強(qiáng)磁場(chǎng)區(qū)域�,磁場(chǎng)方向豎直向下�,三角形的兩條直角邊長(zhǎng)均為l,整個(gè)
4��、裝置的俯視圖如圖4所示.從圖示位置在棒ab上加水平拉力F���,使金屬棒ab和cd向右勻速穿過(guò)磁場(chǎng)區(qū),則金屬棒ab中感應(yīng)電流i和絕緣細(xì)線(xiàn)上的張力大小F′隨時(shí)間t變化的圖像可能正確的是(金屬棒ab中電流方向由a到b為正)( )
圖4
5.(多選)(2018·四川瀘州一檢)如圖5甲所示��,abcd是匝數(shù)為100匝�����、邊長(zhǎng)為10cm����、總電阻為0.1Ω的正方形閉合導(dǎo)線(xiàn)圈,放在與線(xiàn)圈平面垂直的如圖所示的勻強(qiáng)磁場(chǎng)中��,磁感應(yīng)強(qiáng)度B隨時(shí)間t的變化關(guān)系如圖乙所示�����,則以下說(shuō)法正確的是( )
圖5
A.導(dǎo)線(xiàn)圈中產(chǎn)生的是交變電流
B.在t=2.5s時(shí)導(dǎo)線(xiàn)圈產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為1V
C.在0~2s內(nèi)通過(guò)
5、導(dǎo)線(xiàn)橫截面的電荷量為20C
D.在t=1s時(shí)����,導(dǎo)線(xiàn)圈內(nèi)電流的瞬時(shí)功率為10W
6.如圖6所示,導(dǎo)體棒沿兩平行金屬導(dǎo)軌從圖中位置以速度v向右勻速通過(guò)一正方形磁場(chǎng)區(qū)域abcd���,ac垂直于導(dǎo)軌且平行于導(dǎo)體棒��,ac右側(cè)的磁感應(yīng)強(qiáng)度是左側(cè)的2倍且方向相反��,導(dǎo)軌和導(dǎo)體棒的電阻均不計(jì)��,下列關(guān)于導(dǎo)體棒中感應(yīng)電流和所受安培力隨時(shí)間變化的圖像正確的是(規(guī)定電流從M經(jīng)R到N為正方向�,安培力向左為正方向)( )
圖6
7.(多選)空間中存在一垂直紙面向里的勻強(qiáng)磁場(chǎng)�,磁場(chǎng)區(qū)域的橫截面為等腰直角三角形,底邊水平���,其斜邊長(zhǎng)度為L(zhǎng).一正方形導(dǎo)體框abcd的邊長(zhǎng)也為L(zhǎng)���,開(kāi)始正方形導(dǎo)體框的ab邊與磁場(chǎng)區(qū)域橫
6、截面的斜邊剛好重合,如圖7所示.由圖示的位置開(kāi)始計(jì)時(shí)���,正方形導(dǎo)體框以平行于bc邊的速度v勻速穿越磁場(chǎng).若導(dǎo)體框中的感應(yīng)電流為i���,a、b兩點(diǎn)間的電壓為Uab�,感應(yīng)電流取逆時(shí)針?lè)较驗(yàn)檎瑒t導(dǎo)體框穿越磁場(chǎng)的過(guò)程中����,i、Uab隨時(shí)間的變化規(guī)律的圖像正確的是( )
圖7
8.(多選)(2018·河南省八校第二次測(cè)評(píng))如圖8所示�,在光滑水平桌面上有一邊長(zhǎng)為L(zhǎng)、電阻為R的正方形導(dǎo)線(xiàn)框�����,導(dǎo)線(xiàn)框右側(cè)有兩個(gè)寬度也為L(zhǎng)的有界勻強(qiáng)磁場(chǎng)��,磁感應(yīng)強(qiáng)度大小均為B���、方向分別豎直向下和豎直向上.t=0時(shí)導(dǎo)線(xiàn)框的右邊恰與磁場(chǎng)的左邊界重合,隨后導(dǎo)線(xiàn)框在外力作用下����,以速度v勻速進(jìn)入并通過(guò)磁場(chǎng)區(qū)域.規(guī)定電流i沿逆時(shí)針
7�、方向時(shí)為正��,磁感線(xiàn)豎直向下時(shí)磁通量Φ為正��,安培力的合力F向左為正.則以下關(guān)于Φ�、i、F和導(dǎo)線(xiàn)框中的電功率P隨時(shí)間變化的圖像大致正確的是( )
圖8
9.(多選)(2017·山東濟(jì)寧一模)如圖9所示��,在水平面內(nèi)有兩個(gè)光滑金屬“V”字形導(dǎo)軌���,空間中存在垂直于水平面的勻強(qiáng)磁場(chǎng)����,其中導(dǎo)軌bac固定不動(dòng)�����,用外力F使導(dǎo)軌edf向右勻速運(yùn)動(dòng)��,導(dǎo)軌間始終接觸良好����,從圖示位置開(kāi)始計(jì)時(shí)���,下列關(guān)于回路中的電流I的大小和外力F的大小隨時(shí)間的變化關(guān)系正確的是( )
圖9
10.(多選)(2017·安徽省“皖南八校”第二次聯(lián)考)半徑為r���、帶缺口的剛性金屬圓環(huán)在紙面上固定放置�,在圓環(huán)的缺
8����、口兩端引出兩根導(dǎo)線(xiàn),分別與兩塊垂直于紙面固定放置的平行金屬板A��、B連接��,兩板間距為d且足夠?qū)?����,如圖10甲所示.有一變化的磁場(chǎng)垂直于紙面�����,規(guī)定向內(nèi)為正��,變化規(guī)律如圖乙所示.在平行金屬板A��、B正中間有質(zhì)量未知��、電荷量為q的帶電液滴�����,液滴在0~0.1s處于靜止?fàn)顟B(tài)��,已知重力加速度為g.則以下說(shuō)法正確的是( )
甲
乙
圖10
A.液滴帶正電
B.液滴的質(zhì)量為
C.第0.3s時(shí)液滴的運(yùn)動(dòng)方向改變
D.第0.4s時(shí)液滴距初始位置距離為0.08g(單位:米)
11.如圖11甲所示���,光滑平行金屬導(dǎo)軌MN�、PQ所在平面與水平面成θ角���,M�����、P兩端接一電阻為R的定值電阻���,電阻為r的金屬棒
9、ab垂直導(dǎo)軌放置且棒兩端始終與導(dǎo)軌接觸良好�,其他部分電阻不計(jì).整個(gè)裝置處在磁感應(yīng)強(qiáng)度大小為B、方向垂直導(dǎo)軌平面向上的勻強(qiáng)磁場(chǎng)中.t=0時(shí)對(duì)金屬棒施加一平行于導(dǎo)軌向上的外力F�,使金屬棒由靜止開(kāi)始沿導(dǎo)軌向上運(yùn)動(dòng)�����,通過(guò)定值電阻R的電荷量q隨時(shí)間的平方t2變化的關(guān)系如圖乙所示.下列關(guān)于穿過(guò)回路abPMa的磁通量Φ����、金屬棒的加速度a����、外力F、通過(guò)電阻R的電流I隨時(shí)間t變化的圖像中正確的是( )
圖11
答案精析
1.AC
2.AC [0~L過(guò)程中����,此時(shí)AB相當(dāng)于內(nèi)阻為R為電源,B為電源正極�,電勢(shì)較高,AB兩端的電勢(shì)差為路端電壓��,設(shè)為-U���,
此時(shí)由閉合電路歐姆定律有:I=���,U=I·
10�����、R=,
其中E為電源電動(dòng)勢(shì)�����,I為電路總電流�����;
L~2L過(guò)程中�,CD相當(dāng)于內(nèi)阻為R的電源,
此時(shí)UBA=E-IR=E=U����,所以UAB=-U;
2L~3L過(guò)程中���,EF相當(dāng)于內(nèi)阻為R為電源�,
此時(shí)UBA=E-IR=E=U�,所以UAB=-U,
則A圖像符合����,A項(xiàng)正確���,B項(xiàng)錯(cuò)誤;
0~L過(guò)程中��,因?yàn)锳B邊剛進(jìn)入磁場(chǎng)時(shí)框架恰好勻速���,
由受力平衡可知�,電流方向從A到B�,
此時(shí)電流I1==;
L~2L過(guò)程中���,CD相當(dāng)于內(nèi)阻為R的電源�,電流方向從B到A���,
此時(shí)電流I2=-I1=-�;
2L~3L過(guò)程中�,EF相當(dāng)于內(nèi)阻為R的電源,電流方向從B到A��,
此時(shí)電流I3=-I1=-��,
則C圖像符
11、合��,C項(xiàng)正確����,D項(xiàng)錯(cuò)誤.]
3.A 4.AC
5.ACD [在0~2s內(nèi)�����,磁感應(yīng)強(qiáng)度變化率為=1T/s��,根據(jù)法拉第電磁感應(yīng)定律���,產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為E1=nS=
100×0.12×1V=1V���,感應(yīng)電流方向?yàn)槟鏁r(shí)針?lè)较颍辉?~3s內(nèi)�,磁感應(yīng)強(qiáng)度變化率大小為=2T/s,根據(jù)法拉第電磁感應(yīng)定律�����,產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為E2=nS=100×0.12×2V=2V��,感應(yīng)電流方向?yàn)轫槙r(shí)針?lè)较颍畬?dǎo)線(xiàn)圈中產(chǎn)生的感應(yīng)電流為方波交變電流���,選項(xiàng)A正確.在t=2.5s時(shí)�,產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為E2=2V,選項(xiàng)B錯(cuò)誤.在0~2s內(nèi)�����,感應(yīng)電流I==10A����,通過(guò)導(dǎo)體橫截面的電荷量為q=IΔt=20C,選項(xiàng)C正確.在t=1s時(shí)����,導(dǎo)線(xiàn)
12、圈內(nèi)感應(yīng)電流的瞬時(shí)功率P=UI=I2R=102×0.1W=10W��,選項(xiàng)D正確.]
6.A [由E=BLv可知����,導(dǎo)體棒由b運(yùn)動(dòng)到ac過(guò)程中,切割磁感線(xiàn)有效長(zhǎng)度L均勻增大�����,感應(yīng)電動(dòng)勢(shì)E均勻增大,由歐姆定律可知���,感應(yīng)電流I均勻增大.由右手定則可知�,感應(yīng)電流方向由M經(jīng)R到N�����,由左手定則可知����,導(dǎo)體棒所受安培力水平向左����,大小不斷增大,故B�����、C�、D項(xiàng)錯(cuò)誤,A項(xiàng)正確.]
7.AD [由楞次定律可知�,導(dǎo)體框進(jìn)入磁場(chǎng)時(shí)感應(yīng)電流的方向?yàn)槟鏁r(shí)針,出磁場(chǎng)時(shí)感應(yīng)電流的方向?yàn)轫槙r(shí)針�����,由E=BLv可知i==,導(dǎo)體框進(jìn)�����、出磁場(chǎng)時(shí)��,有效切割長(zhǎng)度均由L逐漸變?yōu)榱?��,所以電流也均是從大變小�,A正確��,B錯(cuò)誤����;剛進(jìn)磁場(chǎng)時(shí)ab邊為電源,
13����、Uab為負(fù)值,且大小為BLv���,進(jìn)磁場(chǎng)后Uab均勻減小�,cd邊剛到磁場(chǎng)區(qū)域橫截面的斜邊時(shí)ab邊不是電源,電流從b到a��,Uab為負(fù)值�����,且大小為���,繼續(xù)運(yùn)動(dòng)直到導(dǎo)體框出磁場(chǎng)的過(guò)程中Uab均勻減小�,C錯(cuò)誤����,D正確.]
8.BD 9.AD
10.ABD [根據(jù)楞次定律可知����,在0~0.1s內(nèi)圓環(huán)中產(chǎn)生的感應(yīng)電動(dòng)勢(shì)下板為正,液滴處于平衡狀態(tài)時(shí)���,可知液滴帶正電����,選項(xiàng)A正確����;在0~0.1s內(nèi)圓環(huán)中產(chǎn)生的感應(yīng)電動(dòng)勢(shì)E=S=×πr2=0.1πr2���;對(duì)液滴mg=q,解得m=��,選項(xiàng)B正確�;0.1~0.2s時(shí)電動(dòng)勢(shì)的方向發(fā)生改變,則液滴向下做加速運(yùn)動(dòng)�,0.2~0.3s時(shí)電動(dòng)勢(shì)的方向不變,液滴繼續(xù)向下加速運(yùn)動(dòng)���,0.3~0
14����、.4s時(shí)���,電動(dòng)勢(shì)的方向發(fā)生改變��,液滴向下做勻速運(yùn)動(dòng)��,運(yùn)動(dòng)方向未改變�,選項(xiàng)C錯(cuò)誤���;液滴向下加速運(yùn)動(dòng)的加速度為mg+q=ma�����,解得a=2g,0.1~0.3s內(nèi)液滴向下加速運(yùn)動(dòng)的位移x1=at2=×2g×0.22m=0.04gm���;在0.3s時(shí)刻液滴的速度v=at=2g×0.2m/s=0.4g m/s�����;0.3~0.4s內(nèi)液滴勻速運(yùn)動(dòng)����,故位移為x2=vt′=0.4g×0.1m=0.04gm�,故第0.4s時(shí)液滴距初始位置距離為0.08g(單位:米)����,選項(xiàng)D正確.]
11.C [設(shè)金屬導(dǎo)軌間的距離為l,金屬棒沿導(dǎo)軌向上運(yùn)動(dòng)的位移為x��,由題圖乙可得q=t==kt2�,x=t2,故金屬棒做勻加速直線(xiàn)運(yùn)動(dòng)�����,B錯(cuò)誤;由Φ=Bl可知�����,A錯(cuò)誤����;回路中的電流I=t,由牛頓第二定律有F-mgsinθ-BIl=ma���,故有F=t+mgsinθ+ma�,C正確���,D錯(cuò)誤.]
9
 2019高考物理一輪復(fù)習(xí) 第十章 電磁感應(yīng) 第75講 電磁感應(yīng)中的圖象問(wèn)題加練半小時(shí) 教科版
2019高考物理一輪復(fù)習(xí) 第十章 電磁感應(yīng) 第75講 電磁感應(yīng)中的圖象問(wèn)題加練半小時(shí) 教科版