《行星齒輪機(jī)構(gòu)傳動(dòng)》由會(huì)員分享����,可在線閱讀,更多相關(guān)《行星齒輪機(jī)構(gòu)傳動(dòng)(5頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1�、行星齒輪傳動(dòng)速比計(jì)算方法綜述
楊桂香 郭志強(qiáng) 王明海 楊珍
(中國(guó)一拖集團(tuán)有限公司���,河南 洛陽(yáng) 471039)
摘要:以具有代表性的2K-H型行星齒輪傳動(dòng)為例�,對(duì)行星齒輪傳動(dòng)速比常用的計(jì)算方法進(jìn)行了介紹�;分別用行星架固定法、力矩法�����、速度圖解法等推導(dǎo)出2K-H型行星齒輪傳動(dòng)的特性方程���;并對(duì)三種計(jì)算方法作簡(jiǎn)單對(duì)比,為行星齒輪傳動(dòng)設(shè)計(jì)和計(jì)算提供參考���。
關(guān)鍵詞:行星齒輪傳動(dòng)����;速比��;計(jì)算方法
中圖分類(lèi)號(hào):U461.4 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):
Summary of epicyclic gear train speed rati
2�、o compute way
Yang Guixiang Guo Zhiqiang Wang Minghai Yang zhen
(R&D Center of YTO Group Corporation, Luoyang 471039, China)
Abstract: Taking 2K-H type planetary gear drive as an example, the planetary gear transmission ratio common calculation methods were introduced respectively b
3、y the planet carrier; fixed method, moment method, speed graphic method to calculate the 2K-H type planetary gear drive characteristic equation; and on three kinds of calculation method for simple contrast, planetary gear design and calculation of reference.
Key words: epicyclic gear train; spee
4�、d ratio; compute way.
隨著行星齒輪減速器以及行星齒輪傳動(dòng)在變速箱中的廣泛應(yīng)用����,對(duì)行星齒輪傳動(dòng)的了解和掌握已成為工程技術(shù)人員的必要技能���。但是��,對(duì)于剛接觸行星齒輪傳動(dòng)的工程技術(shù)人員來(lái)說(shuō)����,行星齒輪傳動(dòng)的速比計(jì)算比較不容易理解和掌握���。本文通過(guò)對(duì)各類(lèi)參考資料及教科書(shū)中的行星齒輪傳動(dòng)速比計(jì)算方法進(jìn)行總結(jié)歸納��,并針對(duì)常用的最具代表性的2K-H型行星齒輪傳動(dòng)�,分別用不同方法對(duì)其傳動(dòng)特性方程進(jìn)行了推導(dǎo)論證����。
行星齒輪傳動(dòng)或稱周轉(zhuǎn)輪系。根據(jù)《機(jī)械原理》[1]上的定義���,我們可把周轉(zhuǎn)輪系分為差動(dòng)輪系和行星輪系�。為理解方便����,本論文所討論限于2K-H型周轉(zhuǎn)輪系�����。
關(guān)于行星齒輪傳動(dòng)(周轉(zhuǎn)
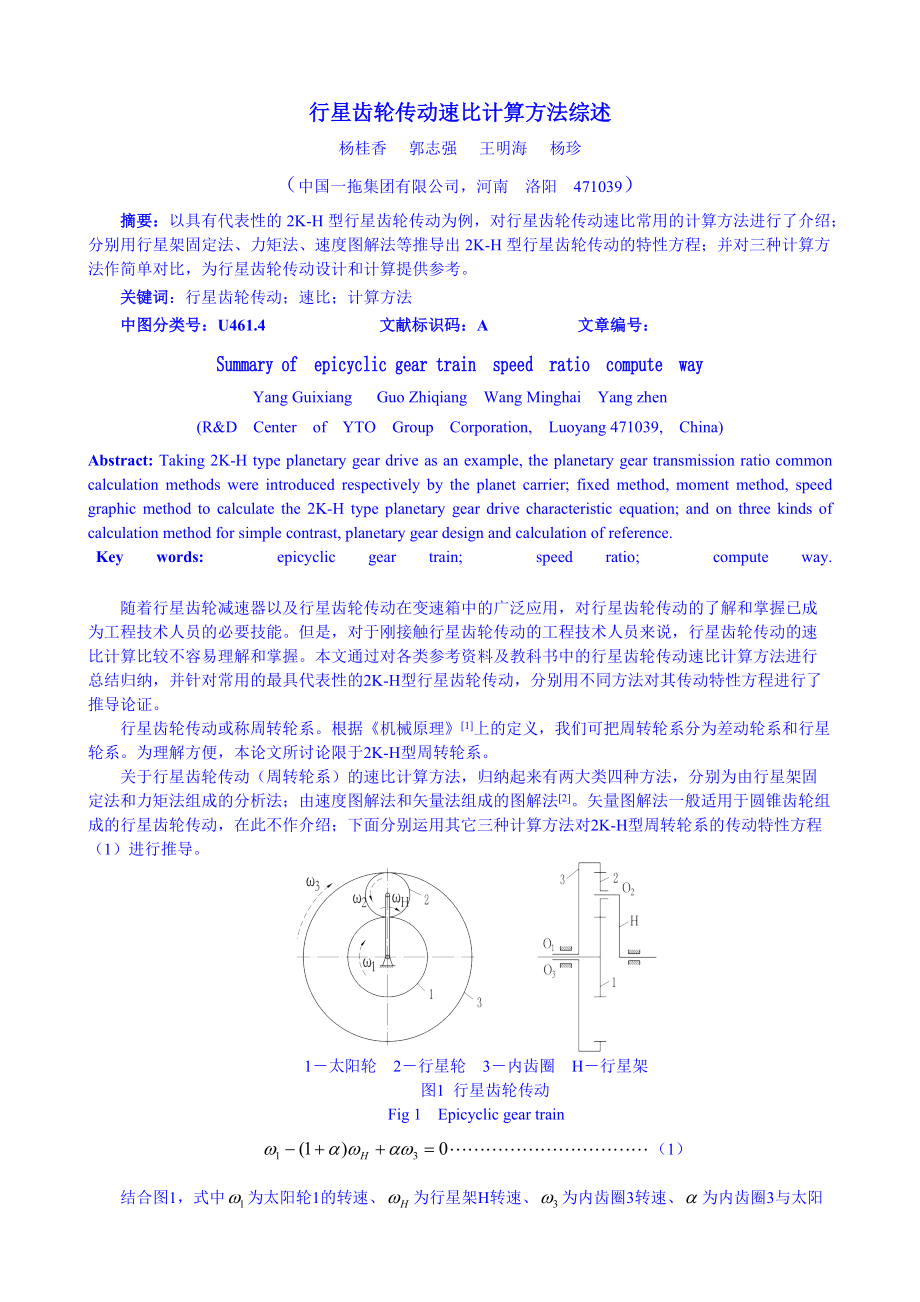
5�、輪系)的速比計(jì)算方法����,歸納起來(lái)有兩大類(lèi)四種方法,分別為由行星架固定法和力矩法組成的分析法���;由速度圖解法和矢量法組成的圖解法[2]�。矢量圖解法一般適用于圓錐齒輪組成的行星齒輪傳動(dòng)����,在此不作介紹��;下面分別運(yùn)用其它三種計(jì)算方法對(duì)2K-H型周轉(zhuǎn)輪系的傳動(dòng)特性方程(1)進(jìn)行推導(dǎo)�����。
1-太陽(yáng)輪 2-行星輪 3-內(nèi)齒圈 H-行星架
圖1 行星齒輪傳動(dòng)
Fig 1 Epicyclic gear train
(1)
結(jié)合圖1��,式中為太陽(yáng)輪1的轉(zhuǎn)速、為行星架H轉(zhuǎn)速����、為內(nèi)齒圈3轉(zhuǎn)速、為內(nèi)齒圈3與太陽(yáng)輪1的齒數(shù)比即���。
1
6��、 行星架固定法
機(jī)械專業(yè)教科書(shū)上一般介紹的都是此種方法���,也可叫轉(zhuǎn)化機(jī)構(gòu)法。其理論是一位名叫Wlies的科學(xué)家于1841年提出的��,即“一個(gè)機(jī)構(gòu)整體的絕對(duì)運(yùn)動(dòng)并不影響其內(nèi)部各構(gòu)件間的相對(duì)運(yùn)動(dòng)” [3]�,就像手表的時(shí)針、分針�����、秒針的相對(duì)運(yùn)動(dòng)不會(huì)因帶表人的行動(dòng)而變化��。
如圖2所示�,其中太陽(yáng)輪1、行星輪2�、內(nèi)齒圈3����、行星架H的轉(zhuǎn)速分別為�。我們假定整個(gè)行星輪系放在一個(gè)繞支點(diǎn)O旋轉(zhuǎn)的圓盤(pán)上,此圓盤(pán)的轉(zhuǎn)速為 ��。那么�����,此時(shí)行星架的轉(zhuǎn)速為�����,相當(dāng)于行星架固定不動(dòng)�����,但行星輪系中的各構(gòu)件相對(duì)運(yùn)動(dòng)關(guān)系保持不變�����?��?捎枚ㄝS輪系的傳動(dòng)比計(jì)算方法來(lái)考慮問(wèn)題�����,我們稱之為行星架固定法�。不難推出:
(2)
1-太
7���、陽(yáng)輪 2-行星輪 3-內(nèi)齒圈
圖2 固定行星架示意圖
Fig 2 The schematic of inverted gear train
式中表示行星架H固定�、太陽(yáng)輪1主動(dòng)����、內(nèi)齒圈3從動(dòng)時(shí)的傳動(dòng)比;
表示當(dāng)行星架H固定��、主動(dòng)件太陽(yáng)輪1的轉(zhuǎn)速�;
表示當(dāng)行星架H固定、從動(dòng)件內(nèi)齒圈3的轉(zhuǎn)速�����;
由(2)式后半部分可便得特性方程:�。
對(duì)于差動(dòng)輪系,利用(1)式����,我們只要知道太陽(yáng)輪轉(zhuǎn)速����、內(nèi)齒圈轉(zhuǎn)速�、系桿(行星架)轉(zhuǎn)速中有兩個(gè),就可求得第三者�;當(dāng)然對(duì)于行星輪系,相當(dāng)于固定三基本構(gòu)件中的一個(gè)���,其它兩構(gòu)件的傳動(dòng)比也很容
8����、易得出�。
固定行星架法,概念清晰�����,應(yīng)用靈活�。我們還可以列出包括非基本構(gòu)件行星輪2的轉(zhuǎn)速在內(nèi)的轉(zhuǎn)速關(guān)系,有興趣的讀者可自行推導(dǎo)���,詳見(jiàn)文獻(xiàn)[3]。
2 力矩法
此方法很易理解和推導(dǎo)。如圖3��,作用于太陽(yáng)輪1上的力矩 �;
作用于內(nèi)齒圈3上的力矩 ;
作用于行星架H上的力矩 �����。
齒圈3與太陽(yáng)輪1的齒數(shù)比為���,即 ���。
因而可由齒輪幾何關(guān)系式得:。
由行星輪2的力平衡條件(勻速轉(zhuǎn)動(dòng))可得:����。
1-太陽(yáng)輪 2-行星輪 3-內(nèi)齒圈 H-行星架
圖3 力矩法示意圖
Fig 2 The schematic
9、 of moment
因此���,太陽(yáng)輪1����、內(nèi)齒圈2和行星架H上的力矩分別為
(3)
根據(jù)能量守恒定律���,三基本構(gòu)件上輸入和輸出功率的代數(shù)和應(yīng)等于零����。即
(4)
(3)式代入(4)式就可得到行星齒輪機(jī)構(gòu)運(yùn)動(dòng)規(guī)律的特性方程:
力矩法,相對(duì)于固定行星架法����,對(duì)抽象思維和空間想象要求不高,只需對(duì)基本對(duì)基本的力矩和功能原理理解�,就很自然的推出相應(yīng)的公式。
文獻(xiàn)[4]對(duì)力矩法也作了介紹���。和本文略有不同�����,但都是基于對(duì)力矩和功能原理得出其特性方程�����。有興趣的讀者可對(duì)比閱讀�。
3 速度圖解法
相對(duì)于分析法��,圖解法不只局限于數(shù)學(xué)上的理解��,其更為直觀,各構(gòu)件的轉(zhuǎn)速一目了然��。 隨著CAD技術(shù)的普及�����,
10�����、原來(lái)計(jì)算結(jié)果不精確的情況也大為改善���。
由《理論力學(xué)》中的剛體平面運(yùn)動(dòng)原理,可將物體的平面運(yùn)動(dòng)簡(jiǎn)化為平面圖形的運(yùn)動(dòng)�。當(dāng)平面圖形運(yùn)動(dòng)時(shí),在每一時(shí)刻都有一個(gè)瞬時(shí)轉(zhuǎn)動(dòng)中心���,即圖形繞著一個(gè)速度等于零的點(diǎn)轉(zhuǎn)動(dòng)���,這個(gè)點(diǎn)稱為絕對(duì)瞬心。應(yīng)用這個(gè)原理來(lái)繪制平面圖形運(yùn)動(dòng)的速度圖的方法����,稱之為速度圖解法���。
為了便于理解,分析前, 先看一下車(chē)輪子沿水平路面作等速直線純滾動(dòng)的情況�。車(chē)輪的滾動(dòng)情況與行星輪有一定的相似之處, 平直的路面可以看作半徑為∞的圓周, 而行星輪只不過(guò)是在有限半徑的圓周上滾動(dòng)罷了。如圖4所示, 車(chē)輪中心O點(diǎn)的速度為,車(chē)輪與地面接觸點(diǎn)的速度為零, 該點(diǎn)即為車(chē)輪子的絕對(duì)瞬心��。在此瞬時(shí), 車(chē)輪上各點(diǎn)的運(yùn)
11�����、動(dòng)就同它們繞瞬心作定軸轉(zhuǎn)動(dòng)時(shí)一樣����。轉(zhuǎn)動(dòng)的角速度為。輪緣上A點(diǎn)的速度��。以此為基礎(chǔ), 便可以對(duì)行星齒輪傳動(dòng)進(jìn)行圖解分析���。
圖4 車(chē)輪前進(jìn)示意圖
Fig 2 The schematic of wheel travel
1-太陽(yáng)輪 2-行星輪 3-內(nèi)齒圈 H-行星架
圖5 速度圖解法示意圖
Fig 2 The schematic of velocity iconoqraphy
分析圖5�,其中A為太陽(yáng)輪1和行星輪2的嚙合點(diǎn)��,B為內(nèi)齒圈3和行星輪2的嚙合點(diǎn)�����,在嚙合點(diǎn)處兩輪的相對(duì)速度為零,即兩輪在此點(diǎn)的絕對(duì)速度相等����,我們把該點(diǎn)稱之為兩構(gòu)件的相對(duì)瞬心。行星輪2中心O2為行星輪2和
12��、行星架的相對(duì)瞬心��。構(gòu)件1�����、3����、H的絕對(duì)瞬心都為O���,而行星輪2的絕對(duì)瞬心為C點(diǎn)(見(jiàn)后面說(shuō)明)�����。
如圖5��,按比例繪出AF��、BD�;其中,AF為太陽(yáng)輪1上A點(diǎn)的線速度�,大小為;BD為內(nèi)齒圈3上B點(diǎn)的線速度�,大小為。至此�,我們已得到構(gòu)件1、2����、3的速度線,分別為OF�����、DE����、OD。DE與OB(或兩延長(zhǎng)線)相交點(diǎn)C就為行星輪2的絕對(duì)瞬心��,也就是說(shuō)行星輪2繞速度為零的點(diǎn)C轉(zhuǎn)動(dòng)���。由DE線可求得O2點(diǎn)的線速度O2E����,可得行星架H的速度線OE。
由圖5可得:(5)
把代入(5)式便可得行星齒輪機(jī)構(gòu)運(yùn)動(dòng)規(guī)律的特性方程(1)式:
圖5只是針對(duì)2K-H型周轉(zhuǎn)輪系中的一種情況���,其它各種情況參考文獻(xiàn)[5]�,其中瞬
13���、心—速度矢量法同本文的速度圖解法�����,原理應(yīng)用都相同
4 綜述
介紹上述三種推導(dǎo)方法,不是純粹的為了推導(dǎo)行星齒輪機(jī)構(gòu)運(yùn)動(dòng)規(guī)律特性方程�����,目的是通過(guò)推導(dǎo)過(guò)程�����,讓讀者了解到三種計(jì)算周轉(zhuǎn)輪系速比的方法�,并根據(jù)自己的情況掌握好一種行星齒輪機(jī)構(gòu)傳動(dòng)比計(jì)算方法。
同時(shí)三種計(jì)算方法都有各自的特點(diǎn)�,適用場(chǎng)合側(cè)重點(diǎn)不同��,有的也幾種方法聯(lián)合應(yīng)用的情況��,如文獻(xiàn)[6]中介紹的一例��,應(yīng)用速度圖解法和固定行星架法聯(lián)合計(jì)算���。行星齒輪傳動(dòng)內(nèi)容博大精深,應(yīng)用會(huì)越來(lái)越廣��,望讀者在后續(xù)使用過(guò)程中繼續(xù)體會(huì)�。
參考文獻(xiàn) :
[1] 孫 桓,陳作模���,葛文杰�����。機(jī)械原理[M]. 第七版.北京:高等教育出版社�,2006���,214-218.
[2] 饒振綱��。行星齒輪傳動(dòng)設(shè)計(jì)[M]. 北京:化學(xué)工業(yè)出版社, 2003�����,14.
[3] 張國(guó)瑞���,張 展�。行星傳動(dòng)技術(shù)[M]. 上海:上海交通大學(xué)出版社�����,1989��,6�����、16.
[4] 鄧正思�����。自動(dòng)變速器行星齒輪機(jī)構(gòu)的速比計(jì)算[J]. 汽車(chē)維修���,2007(4),43-46.
[5] 李純德,鄒本友��。行星齒輪傳動(dòng)速度分析的瞬心—速度矢量法[J]. 機(jī)械設(shè)計(jì)與制造�,2003(4),15-18.
[6] 肖 敏�,孫逸華。兩種計(jì)算行星齒輪機(jī)構(gòu)傳動(dòng)比方法的聯(lián)合應(yīng)用[J]. 機(jī)械�����,2008(5)���,13-15.
 行星齒輪機(jī)構(gòu)傳動(dòng)
行星齒輪機(jī)構(gòu)傳動(dòng)