《《自動(dòng)控制理論》第五章自測(cè)題》由會(huì)員分享��,可在線閱讀�����,更多相關(guān)《《自動(dòng)控制理論》第五章自測(cè)題(5頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1、第5章 線性系統(tǒng)的頻域分析法
?自測(cè)題
1. 設(shè)控制系統(tǒng)的開環(huán)傳遞函數(shù)為
G(s)H(s)=
K
s(l + Ls)(l + Es)
(1) 試分析不同K值時(shí)系統(tǒng)穩(wěn)定性����;
(2) 確定當(dāng)Ti=\, 72=0.5和K=0.75時(shí)系統(tǒng)的幅值裕度。
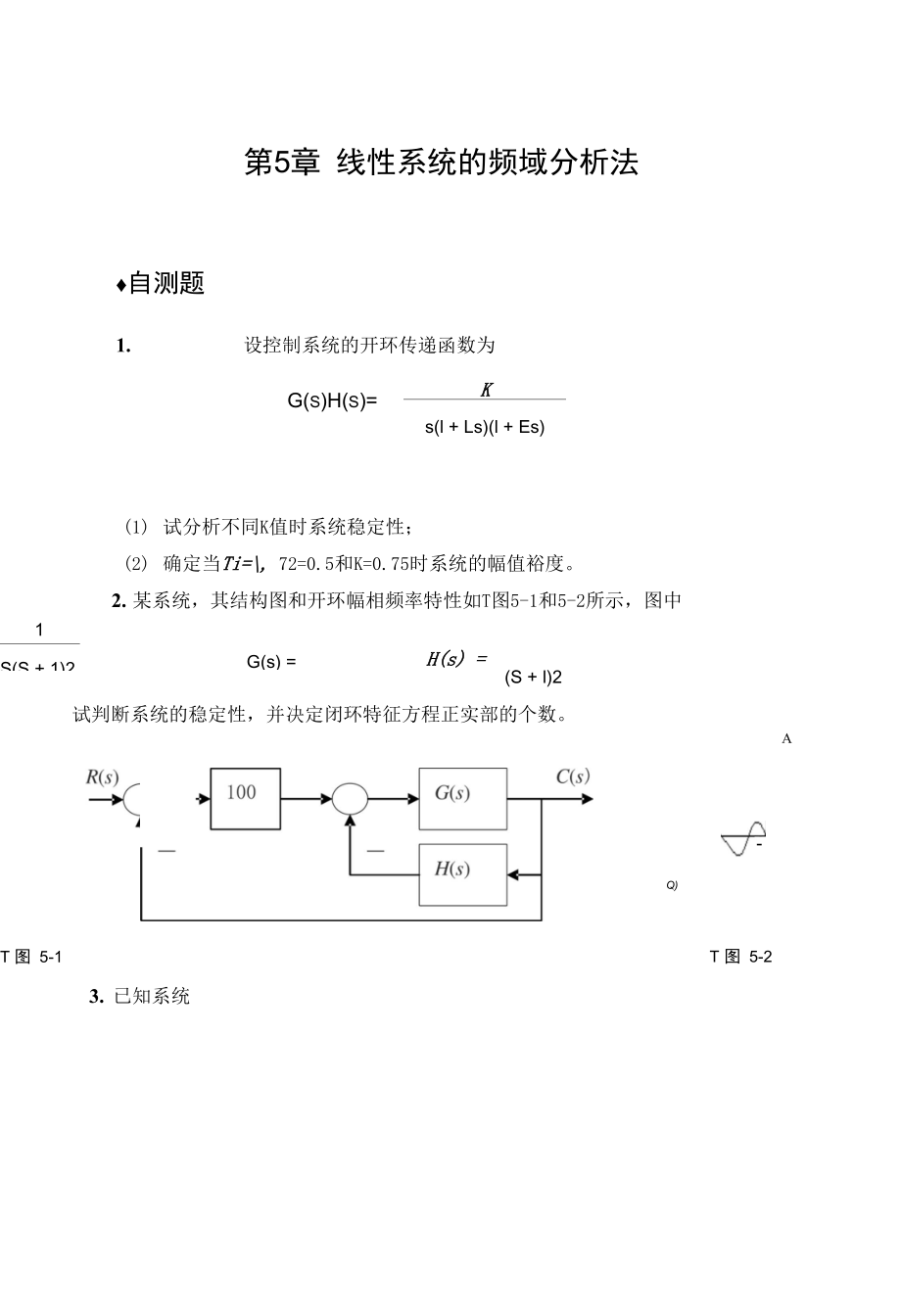
2. 某系統(tǒng)��,其結(jié)構(gòu)圖和開環(huán)幅相頻率特性如T圖5-1和5-2所示����,圖中
G(s) =
1
S(S + 1)2
H(s) =
(S + l)2
試判斷系統(tǒng)的穩(wěn)定性�,并決定閉環(huán)特征方程正實(shí)部的個(gè)數(shù)����。
a Im
T 圖 5-1
-T
Q)
T 圖 5-2
3. 已知
2����、系統(tǒng)
火)=茶面’= l +
試確定閉環(huán)系統(tǒng)臨界穩(wěn)定時(shí)Kh的值。
4. 最小相位系統(tǒng)對(duì)數(shù)幅頻漸近特性如T圖5-3所示���,試確定系統(tǒng)的傳遞函數(shù)�。�
30 ° 20
-20
0 0. 1
T 圖 5-3
5. 如T圖5-4所示的多回路系統(tǒng)����,為利用奈氏判據(jù)判別系統(tǒng)的穩(wěn)定性,T將圖5-4
變換成T圖5-5,設(shè)
(1) G2(S)H2(S)在右半S平面的極點(diǎn)為Pl�����,當(dāng)―從0變化到8時(shí)��,頻率特性曲
G2 Ucd)H2 (/初)逆時(shí)針包圍(1, jO)點(diǎn)的圈數(shù)為N\ ��;
H2(5)
(2) 乩(s)G (s)在右半s平面的極點(diǎn)數(shù)為尸2;
(3)頻率特性曲線H\(j(D)G\(j
3�、co)G3(j(D),當(dāng)④從。變化8到時(shí)�����,逆時(shí)針包圍(1,
jO)點(diǎn)的圈數(shù)為M����,式中,
G?)=。2(加5)
試確定多回路系統(tǒng)穩(wěn)定的條件O
T 圖 5-4
G3(s)
T 圖 5-5
T 圖 5-6
7. 某系統(tǒng)的開環(huán)傳遞函數(shù)為
G(s)H(s) = -—
s +1
試?yán)L制其奈奎斯特圖�,并判別其穩(wěn)定性。
8. 設(shè)單位反饋控制系統(tǒng)的開環(huán)傳遞函數(shù)為
G(s) =
K
s(l + 0.2s)(l + 0.ls)(l + s)
(1) 繪制K=1時(shí)的伯德圖����;
(2) 確定使系統(tǒng)在閉環(huán)時(shí)處于臨界穩(wěn)定的速度誤差系數(shù);
(3) 確定幅值裕度為WdB時(shí)的
4�����、速度誤差系數(shù)及相應(yīng)的相角裕度����。
9. 已知某最小相位系統(tǒng)的幅相頻率特性曲線如T圖5-7所示,系統(tǒng)的開環(huán)傳遞系數(shù)
K=500,確定使系統(tǒng)穩(wěn)定的K的取值范圍����。
10.在T圖5-8所示系統(tǒng)中,
0(s)=虬3 + 1), G,(s) =
1 TS - (7> + ])(&s + l)
且知T1=5T2, K2>0,試選擇Ki及丁����,使系統(tǒng)相位裕度不低于45°,同時(shí)有盡可能快�
的響應(yīng)速度���。
R(s)
C(s)
T 圖 5-8
11.系統(tǒng)的開環(huán)傳遞函數(shù)為
G(s)H(s)=
"s + l)(&s + l)(7�����;s + l)
Tl,% 丁3均大于零�,試用奈氏判據(jù)證明:若系統(tǒng)不穩(wěn)定,必有兩個(gè)極點(diǎn)在右半S平面�����。
 《自動(dòng)控制理論》第五章自測(cè)題
《自動(dòng)控制理論》第五章自測(cè)題